LEGO 6x6-truck wielbasis
 .
.
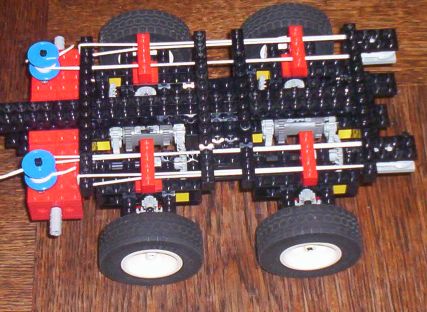
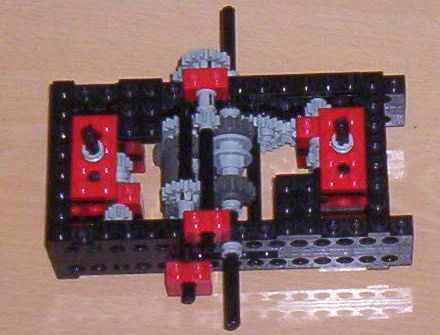
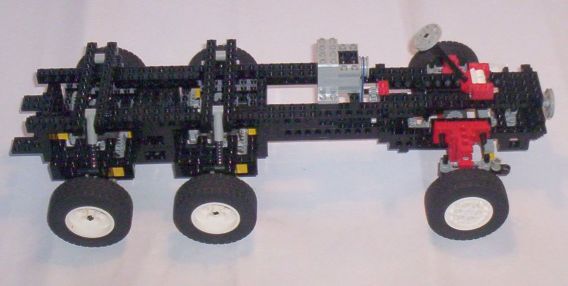
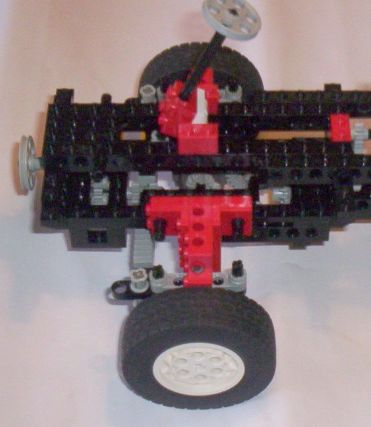
28 Januari 2005. Mijn eerste poging tot een 6x6 truck. Alle wielen worden aangedreven vanuit een centrale as die boven de wielen ligt. Deze as drijft de drie differentielen voor elk paar wielen aan. In de as zelf zijn geen differentielen geplaatst, omdat ik die niet meer heb :-). Het frame is star en moet ook star zijn omdat er anders te veel wrijving op deze centrale as komt. Elk achterwiel kantelt en is apart geveerd. De voorwiel ophanging draait als geheel om een as die onder de centrale aandrijf as ligt. Elke wielophanging is zo gemaakt dat de assen van de aandrijftandwielen en de draaipunten in de ophanging wel in elkaars verlengde liggen maar niet verbonden zijn. De motor is er improvisorisch opgezet om de constructie te testen. Voor meer snelheid of meer kracht is een tweede motor wel gewenst. Met name in een scherpe bocht merk je dat de motor het zwaar krijgt. Tussen de voor en achterwielen moet genoeg ruimte zijn voor twee motoren. Een nep motor met zuigers en cylinders moet dan boven de voorwielen of de echte motoren worden geplaatst.
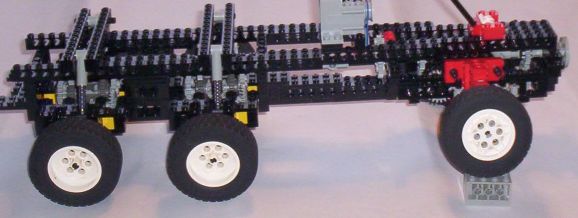

De voorwielen kunnen verder op en neer bewegen dan de achterwielen. Wanneer een obstakel op de weg hoger is dan pakweg 1 cm gaat het naastliggende achterwiel zweven. Het ophangpunt van de veren zou eigenlijk verplaatsbaar gemaakt moeten worden om de vering te kunen instellen op het gewicht dat de wielen moeten dragen en de hoeveelheid gewenste uitslag.

In de ophanging van elk wiel is en vertraging van 1:3 opgenomen. De aandrijf assen en daarmee de wielbasis komt dan hoger te liggen dan de wielassen. De truck kan dus geen buikschuiver worden genoemd
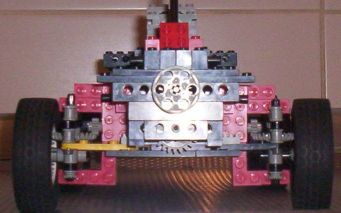
De ophanging van een aangedreven stuurwiel kan op dezelfde manier worden gedaan als bij de achterwielen. Ik heb alleen nog geen idee hoe ik dan een stuurstang moet plaatsen.

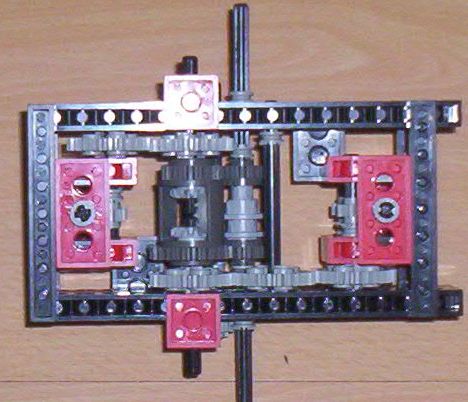
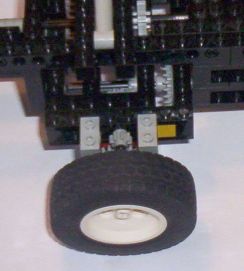
Voor de achterwielen heb ik eerder nog geexperimenteerd met Lego-elastiek.
De spanning op het elastiek wordt voor elke kant apart geregeld en vastgehouden
met een wormwiel constructie.